
こんにちは。Gajetter | 暮らしアップデート、運営者のGioです。
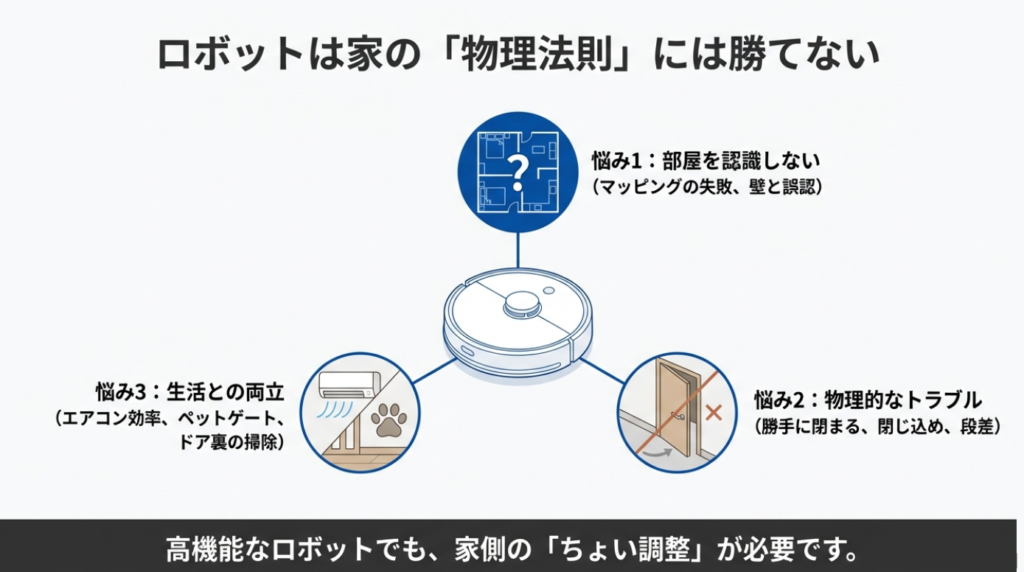
ロボット掃除機のドア開けっ放しって、地味ですが毎日の使い勝手に直結する悩みどころですよね。マッピングがうまくいかず部屋を認識しない、掃除中にドアが勝手に閉まって閉じ込められる、ルンバがドアの後ろを掃除できない……。
さらにエアコンや冷暖房の効率、ペットゲートの必要性、ベビーゲートの段差、スロープでいけるのかも気になるはず。
この記事では、ドアを開けるべきタイミングと、開けっぱなし運用で起きがちなトラブルの現実的な潰し方を、私の視点で徹底的にまとめます。後から部屋を追加認識させるコツや、失敗しないドアストッパー選びの勘所も一緒に整理していきましょう。
結局のところ、ロボット掃除機はどんどん賢くなっても、家のドアや段差って「物理」が相手なんですよ。だからこそ、設定や使い方に加えて、家側のちょい調整が劇的に効きます。あなたの家の間取りや暮らし方に合わせて、無理のない落とし所を一緒に探していきましょう。
- ドアを開けるべきタイミングと理由
- 部屋認識しないときのマップ更新手順
- 勝手に閉まる・閉じ込めの予防策
- ペットゲートと段差2cmの対処
ロボット掃除機のドア開けっ放しは必要?
結論から言うと、一年中ずっと開けっぱなしが正義というより、「必要な時だけ戦略的に開ける」のが最もラクで効率的です。
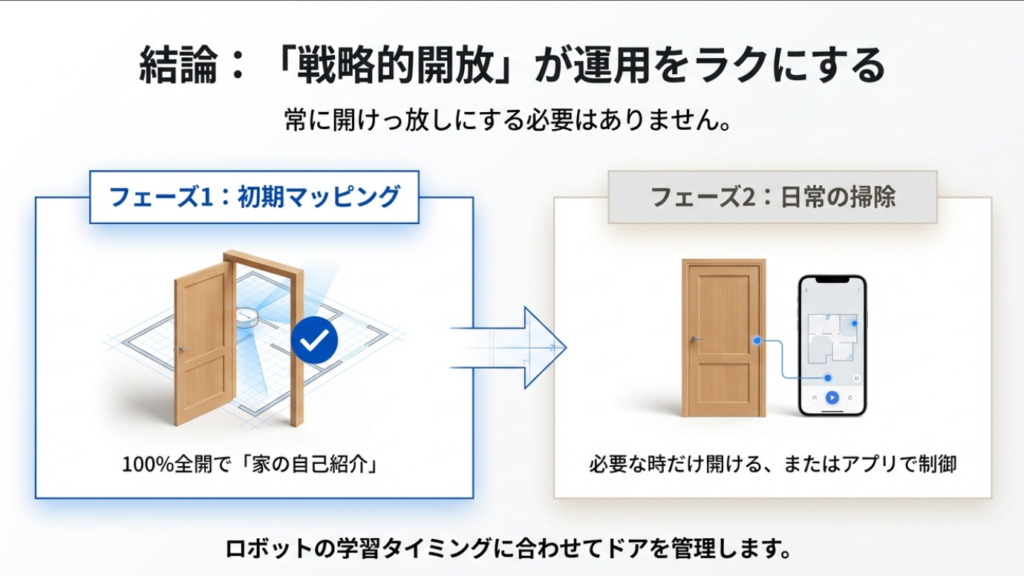
特に「最初の地図づくり(マッピング)」と「部屋の追加認識」は、ドア運用で結果が変わりやすいポイント。ここでは、ドアの扱いがロボットの理解にどう影響するかを、噛み砕いていきます。
初期マッピングは全開が鉄則
初期マッピングは、ロボット掃除機の“性格”と“頭脳”が決まる重要なタイミングです。ここで一度でもズレると、あとからずっと「なんでそこ行かないの?」みたいなストレスにつながりやすいんですよね。

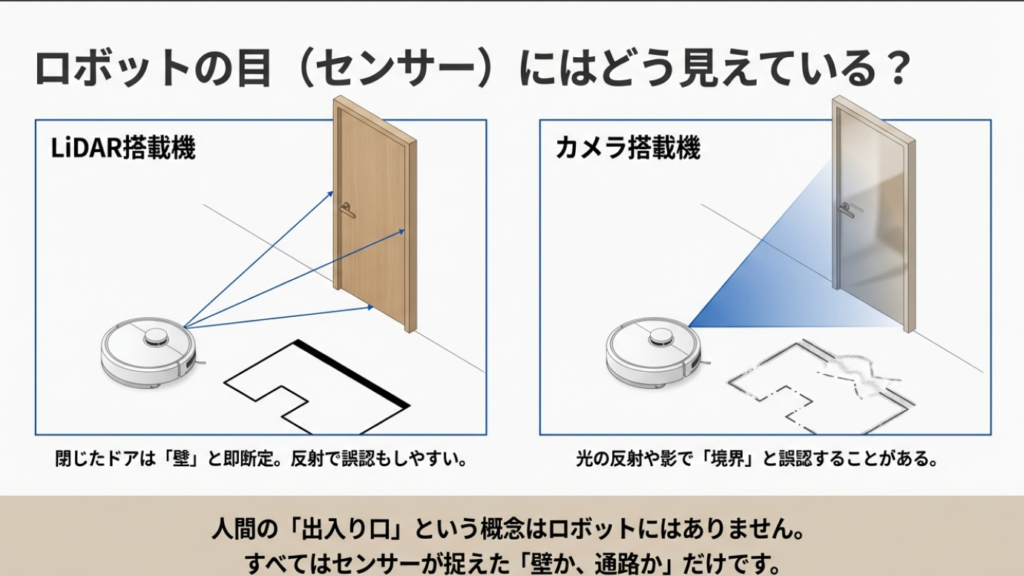
LiDAR(レーザー)でもカメラでも、ロボットは基本的に「見えたものを世界のすべて」として覚えるので、初回にドアが閉まっていると、その先の部屋が「存在しないもの(ただの壁)」として扱われやすいです。
私がよく言うのは、初期マッピングは「家の自己紹介」みたいなものだということ。最初の自己紹介で、閉じたドアの向こうを見せなかったら、ロボットは「そこは壁なんだな」と理解します。もちろん機種やアプリの挙動差はありますが、少なくとも失敗しにくいのは、初回だけは家中のドアを全開にして固定するやり方かなと思います。
LiDARとカメラの「ドアの見え方」ざっくり比較
| 方式 | 閉じたドア・鏡の扱い | 半開きのドアの扱い | 初期マッピングでの注意 |
|---|---|---|---|
| LiDAR (レーザー) | 閉まっていれば壁判定。 鏡や掃き出し窓は「通路」や「未踏の部屋」と誤認しやすい(ゴースト部屋)。 | 角度によって壁か通路か迷いやすい。 黒い建具は測定しづらい場合がある。 | ドアは全開固定が鉄則。 鏡は下部を隠すと安定する。 |
| カメラ (VSLAM等) | 暗い部屋や逆光だと境界を見失うことがある。 特徴点が少ないと迷いやすい。 | 光の当たり方で誤検知が出ることがある。 | 照明・逆光・床反射も一緒に整える。 部屋を明るくする。 |
初回マッピングで失敗しやすい罠
地味に効いてくるのが、ドアそのものより「ドアの周辺環境」です。たとえば、ドアの前に薄い玄関マットがあって、ロボットがそこで引っかかる。コードがあって、ドア手前で止まる。あるいはドアが半開きで、ロボットが当てた拍子に閉じてしまい、ロボットが部屋の中に閉じ込められる。こういう“小さな事故”が初回に起きると、マップの完成度が落ちて、以後のルートや部屋分割がぐちゃっとなりがちです。
なので私は、初回だけは「掃除」を期待しすぎず、「正確な地図を作らせるためのイベント」として扱います。床は軽く片づけて、ドアは全開で固定、充電ドック周りはスッキリ、これだけでもかなり成功率が上がりますよ。
初回マッピング前の準備リスト
- ドアは全開で固定(半開きは絶対に避ける)
- 床の小物・コード・薄いマットは一時退避
- 鏡や床まである窓ガラスは、カーテン等で下部を隠すと「ゴースト部屋」を防げる
- 充電ドック周辺は広めに空ける
なお、初期マッピングの仕様や推奨手順は機種やアプリで結構違います。最近のハイエンド機種(RoborockやEcovacs、Dreameなど)には、掃除をせずに走行だけを行う「クイックマッピング(高速マッピング)」機能が搭載されていることが多いです。これを使えば数分で地図が完成するので、まずは公式アプリにその機能がないか確認してみてください。

ドア閉めると部屋認識しない?
ここ、気になりますよね。まず前提として、ロボット掃除機にとって「ドア」は人間みたいに“出入り口”という概念そのものではなく、センサーが拾った境界(壁っぽいもの)の一部として処理されがちです。

特にLiDAR系は、閉じたドアを物理的な「壁」として捉えやすいので、ドアの向こうに「部屋があるかも」という発想が入りにくいです。カメラ系でも、ドアの色、床の反射、光の当たり方で境界扱いになったりします。
「部屋認識しない」の正体は2パターン
体感として、原因はだいたい2つに分かれます。
よくある2パターン
- 最初から存在しない扱い:初期マッピング時にドアが閉まっていて、その部屋がマップに出てこない
- マップはあるが入らない:部屋は表示されるのに、侵入ルートが塞がれている扱いになっている(境界の誤認など)
前者は「初回の全開固定」でかなり防げます。後者は、ドア周辺でロボットが躊躇していたり、部屋の入口が狭かったり、床の段差やラグで入口付近の走行が不安定だったり、いろんな要因が絡みます。だから、単にドアを開けるだけじゃなく、入口周りの“走りやすさ”を一回チェックするといいです。
ドアを閉めた運用はアリ?
答えは「全然アリ」です。むしろ、生活の質を守る意味では合理的なことも多いです。たとえば寝室や書斎は静かに保ちたい、在宅ワーク中は入ってほしくない、ペットのごはんエリアは荒らしたくない、子どもが昼寝中に近づいてほしくない、みたいなケースですね。ロボット掃除機は“全部屋を毎回掃除する”のが正解というより、あなたの生活に合わせて掃除を分割するほうが続きます。
ポイントは、ドア運用を「ロボットのミス」扱いしないこと。ロボットは見えた範囲で最適化しているだけなので、ドアの使い方=家のルールとして設計してあげるとストレスが減ります。
ただし、部屋の立ち入り制御は、ドアだけに頼ると「うっかり開けた」「誰かが閉めた」で揺れます。対応機種なら、部屋指定や進入禁止を併用して、ルールを固定化するのがラクです。最終的な設定方法は機種ごとに違うので、公式アプリの案内をご確認ください。
後から部屋追加する裏技
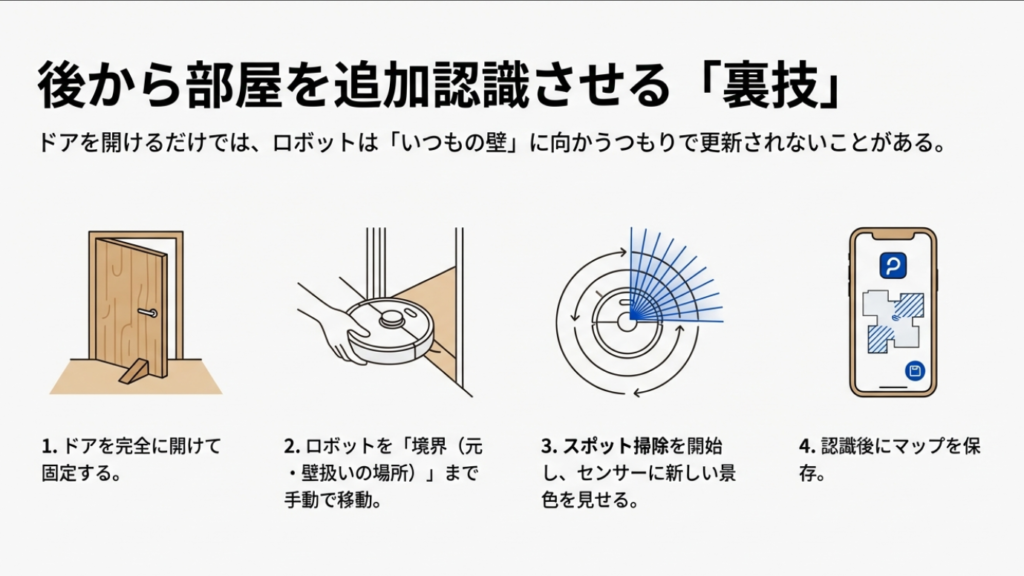
「最初にドア閉めてて、あとから開けたのに入ってくれない」問題、わりとあるあるです。これ、ロボットが意地悪してるというより、ロボットの中の地図が「その先は壁」として固まっている状態に近いんですよね。だから、ただドアを開けるだけだと、ロボットは入口付近で“いつもの壁”に向かっているつもりになって、うまく更新が走らないことがあります。
コツは「境界で更新イベントを起こす」
裏技の本質は、ロボットが地図更新しやすいタイミングを作ることです。具体的には、ドアの境界(元・壁扱いの場所)付近でセンサー情報を増やすのがポイント。手動操作やスポット清掃が効くのは、そのためです。ロボットに「ここ、いつもと違う反射(映像)があるぞ?」を気づかせるイメージです。
部屋を追加認識させる手順(一般的な目安)
- 対象のドアを完全に開けて固定する
- ロボットを手動操作(アプリのリモコン等)でドア前まで移動させる
- その場所でスポット掃除やエリア掃除を開始する
- 部屋を認識したら、アプリでマップを保存・バックアップする
うまくいかないときの追加チェック
ここ、詰まりやすいので追加の見立てを置いておきます。まず、ドアの先が暗すぎる・逆光すぎると、カメラ系は入口を怖がることがあります。次に、入口付近に段差や毛足の長いラグがあると、ロボットが「入れるけど出られない」リスクを避ける動きをすることがあります。最後に、マップが複数保存されていて、別のマップを参照しているケースもあります。アプリ側で“今のマップ”がどれか一度確認すると、急に解決することもありますよ。
マップ更新の可否や操作名(スポット掃除、エリア掃除、マップ編集など)は機種によって差があります。正確な操作は公式アプリの案内を確認してください。うまくいかない場合は、メーカーサポートへ相談するのが早いです。
「毎回この部屋は掃除したい」なら、部屋認識ができたあとに、部屋分割や名前付けをしておくと運用が楽になります。ここも機種差があるので、最終的には公式の案内が正です。
ルンバのドアの後ろ掃除
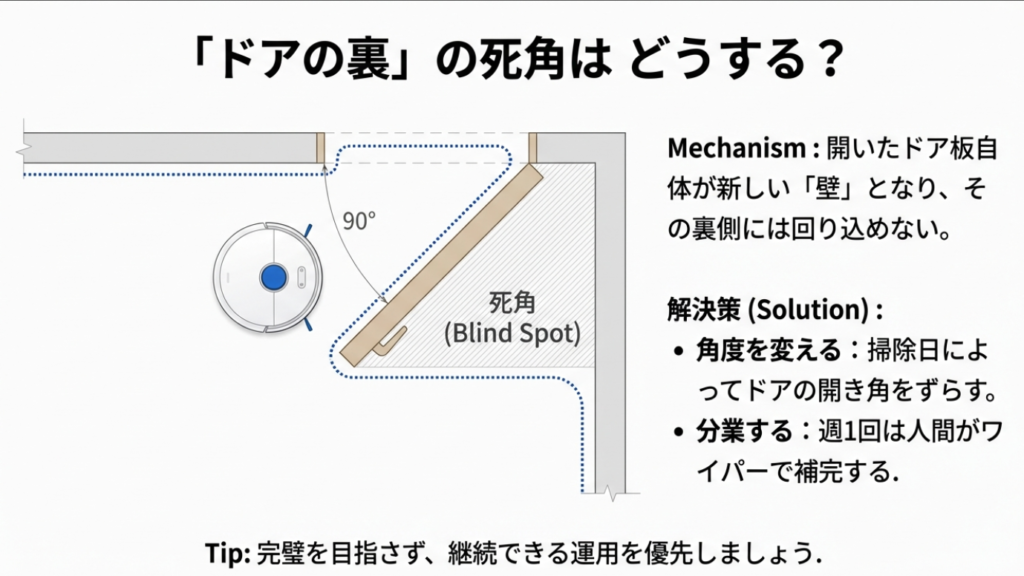
廊下でドアを開けっぱなしにすると、「ドアの裏(ドアと壁のすき間)」が残りやすいですよね。これはルンバに限らず、ロボット掃除機の構造上、壁際をトレースしながらもドア板そのものが壁を隠すので、どうしても死角ができます。人間の感覚だと「ドアの裏まで行ってほしい」んですが、ロボットからすると、そこは“壁の内側”みたいな扱いになりやすいです。
ドア裏が残る理由をもう少し噛み砕く
多くのロボット掃除機は、壁に沿って走るときに、サイドブラシや本体の側面センサーで距離を保ちます。ところがドアが開いていると、壁のラインが途中で分断されて、ドア板が新しい“壁”として出現します。するとロボットは、ドア板の外側(廊下側)を壁際として掃除しがちで、ドア板の裏側(壁側)に回り込む理由が弱いんですよね。
現実的に効くのは「死角をずらす」
私がよくやるのは、運用で“角度”を変えることです。たとえば掃除の曜日でドアの開き角を変える、あるいは掃除中だけドアを少し閉じ気味にして、終わったら開ける。これだけで、ドア裏の取り残しが散らばりにくくなります。要するに、ロボットに毎回同じ死角を作らせないのがコツです。
ドア裏の取りこぼしを減らすコツ
- 掃除日ごとにドア角度を変える(死角をずらす)
- ドアを壁に密着させず、少し角度を残す
- 気になる日は廊下だけスポット清掃を足す
どうしても気になるなら「掃除の分業」もアリ
ドア裏の取りこぼしって、ゼロを狙うと消耗します。なので私は、週1回は人間の掃除(フロアワイパーやハンディ)でさらっと補完して、ロボットは日々の維持管理に任せる、みたいな分業をおすすめしがちです。ロボット掃除機の強みは「毎日文句も言わずにやってくれること」なので、完璧さより継続で勝つほうが、結果的に部屋がキレイになりますよ。
エアコン冷暖房と開放の両立
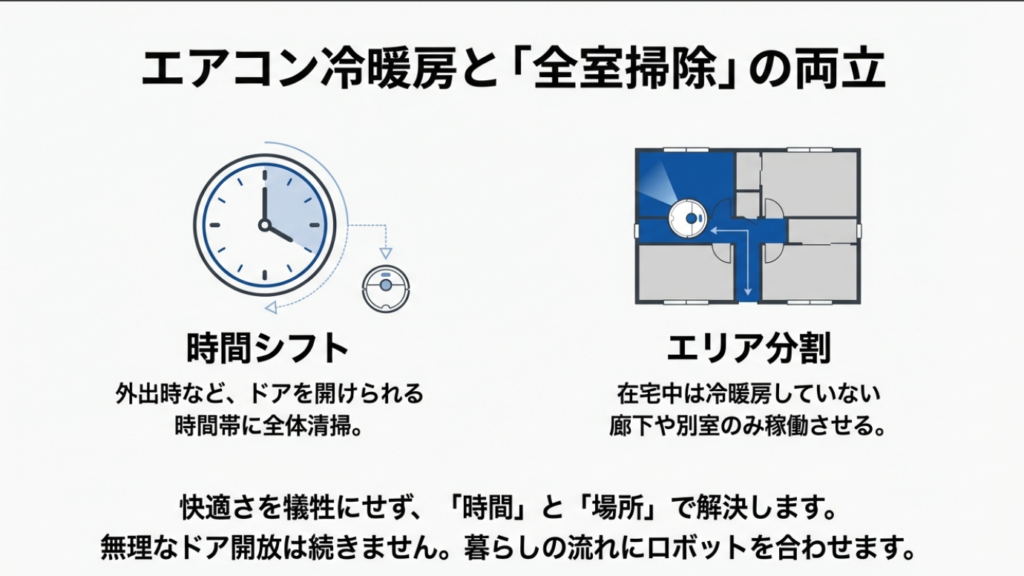
冷暖房中はドアを閉めたい。でもロボットは全部屋を回ってほしい。このジレンマ、かなり多いです。ここ、気になりますよね。私も「暑い寒いは我慢したくない派」なので、ドア開放を無理に続ける発想はあまりおすすめしません。結局、快適さが崩れるとロボット運用そのものが続かないんですよ。
両立の基本は「時間」と「順番」
私がよくやるのは、時間と順番で解く方法です。つまり、冷暖房を効かせたい時間はドアを閉めて、掃除は別の時間帯にまとめる。あるいは、部屋単位で掃除を分割して、冷暖房していないゾーンだけ回す。ロボット掃除機の強みは、自動化とスケジュールなので、暮らしの流れに載せるのが正解かなと思います。
おすすめの落とし所
- 在宅中は掃除範囲を絞る(リビングだけ、廊下だけ)
- 外出・就寝前など、ドアを開けられる時間帯に全体清掃
- 部屋単位でスケジュールを分ける(対応機種なら)
「ドア閉めっぱなし運用」で意外と困るところ
実は、ドアを閉める運用にすると、掃除の抜けが“部屋単位”で固定されます。つまり、今日は寝室、今日は書斎、みたいに回さない限り、ホコリの偏りが出やすい。だから、週のどこかで全体清掃の時間を作るか、部屋指定でローテーションを組むのが相性いいです。
「ドアは閉めたいけどロボットに任せたい」なら、エリア指定や部屋指定ができる機種が相性いいです。運用設計の考え方は、下の記事も参考になります。
冷暖房効率や体調への影響は住環境で変わります。数値や体感は個人差が大きいので、無理のない範囲で調整してください。

ロボット掃除機のドア開けっ放し対策
ここからは、ドアを開ける運用で起きがちな「勝手に閉まる」「閉じ込め」「ペットは通したくない」「ゲートの段差が無理」みたいな現場トラブルを、物理対策としてまとめます。ロボット掃除機は賢くなっても、家の物理法則には勝てないので、環境側をちょい整えるのが一番効きます。
勝手に閉まる原因は衝突と排気
ドアが勝手に閉まるのって、地味にストレスですよね。ロボット掃除機は静かに働いてほしいのに、ガタンって音がして「止まった?」って見に行く羽目になる。私の経験だと、原因はだいたい衝突と空気の流れ、そしてドアの状態(滑りやすさ・傾き・蝶番)の3つが組み合わさって起きます。
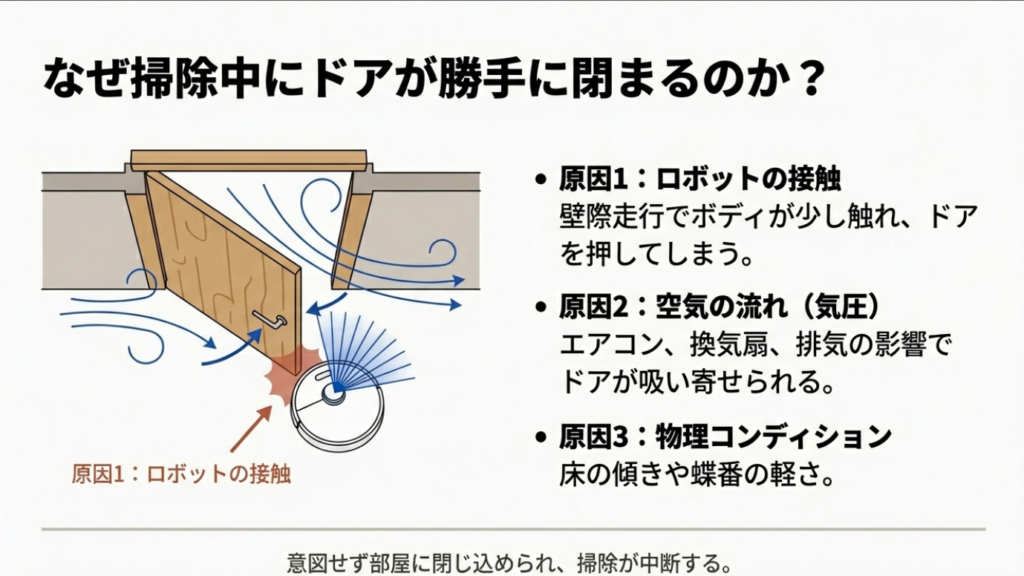
原因1:ロボットがドアを“押す”
ロボット掃除機は壁際を攻めるので、ドア付近も寄ってきます。ドアが開いていると、ドア板が壁の延長として見えて、ロボットが沿うように走って、結果的にドアを押してしまうことがあるんですよね。押すつもりはなくても、ボディがちょっと当たるだけで、軽いドアは動きます。
原因2:排気・換気・空調でドアが動く
意外に見落としがちなのが、空気の流れです。エアコンやサーキュレーター、24時間換気、レンジフードの影響で、ドアが吸い込まれるように動くことがあります。ここにロボットの走行が加わると、ドアは「閉まる方向」に勢いがついて、最終的にバタンと閉じる。
原因3:ドアの物理コンディション
床が少し傾いていたり、蝶番が軽かったり、ドアクローザーの調整が強めだったりすると、ドアは放っておいても動きます。つまり、ロボットが悪いというより、家のドアが“動きやすい設定”になっている場合があるんですよ。ここは建具の領域なので、無理に触らないのが安全です。
あなたの家で起きてる原因を切り分けるチェック
- ロボットが走っていない状態でも、ドアが自然に閉じるか
- 換気扇やサーキュレーターを回すと閉じやすくなるか
- ドアを少し押すだけでスッと動くか
- 閉じた直後にロボットが止まる(閉じ込め)パターンがあるか
このあと紹介するドアストッパーやゲートの話は、こういう「勝手に閉まる」を現実的に止めるための手段です。気合でドア運用するより、物理で解決したほうがラクですよ。
ドアストッパーで閉じ込め防止
閉じ込め対策は、結局ドアストッパーが一番ラクです。ただし、何でもいいわけじゃなくて、ロボット掃除機と相性が出ます。床に置く楔型は安いけど、ロボットが障害物扱いして避けたり、乗り上げてエラーになったりしがち。毎回セットする手間も増えます。ここ、めちゃくちゃ大事で、“自動化”のために買ったロボットが、ドアストッパーの手作業で台無しになりがちなんですよね。

ロボット掃除機と相性がいいドアストッパーの条件
私はドアストッパーを選ぶとき、次の4点を優先します。まず、ロボットが壁際を走っても干渉しにくい薄さ。次に、ロボットが当たっても保持できる摩擦(または固定力)。そして、置きっぱなしでも生活動線の邪魔にならないこと。最後に、操作がラクで、毎日続けられることです。
選び方の優先順位(私のおすすめ)
- 干渉しにくさ:ロボットの壁際走行を邪魔しない形状
- 保持力:軽い衝突や空気の流れで負けない
- 運用のラクさ:足で操作できる、置きっぱなしでも邪魔にならない
- 設置条件:賃貸ならネジ固定を避けるなど
タイプ別の現実(使って分かる差)
床置き楔型は、導入コストは低いけど、ロボットが回避対象として学習したり、段差として乗り上げたり、地味に相性問題が出やすいです。ネジ固定型は強いけど、賃貸だとハードルが高い。そこで私が推したいのが、ドア一体型やマグネット式など、床の占有が少ないタイプ。たとえば山崎実業の折り畳み式マグネットドアストッパーは、使わないときは折りたためて、ドア面に収まるので、床に障害物を増やしません。
▼床を邪魔しない、私が一番信頼しているストッパー
足で操作できて、使わない時はドアに一体化。ロボット掃除機の邪魔を一切しません。
ドアストッパー選びの目安(一般的)
| タイプ | メリット | 注意点 | ロボット相性 |
|---|---|---|---|
| 折り畳み式・マグネット系 | 床の邪魔になりにくい/操作がラク | ドア材質や設置条件に左右される | 良い(床を塞がない) |
| 床置き楔型(ゴム等) | 安い/手に入りやすい | 障害物認識で避ける・乗り上げリスク | 注意(機種差が出やすい) |
| ネジ固定型 | 保持力が強いことが多い | 賃貸だと導入しにくい場合がある | 良い(ただし設置が前提) |
※ドアストッパーを選ぶ際は、必ずご自宅の「ドアと床の隙間の高さ」を測ってください。隙間が広すぎるとストッパーが床に届かず、狭すぎると設置できない場合があります。
参考として、山崎実業の製品情報を掲載しておきます。(出典:山崎実業公式「smart|マグネット折り畳みドアストッパー スマート」)
ペットゲートは高さ13cm目安(※要注意)
ロボットは通したいけど、ペットや幼児は通したくない。これ、めちゃくちゃ多い悩みです。しかも、ここで失敗すると困るのは掃除効率だけじゃなくて、安全面なんですよね。だから私は、ペットゲートの話は「便利グッズ」よりも、まずリスクを潰す設計として考えるのをおすすめします。
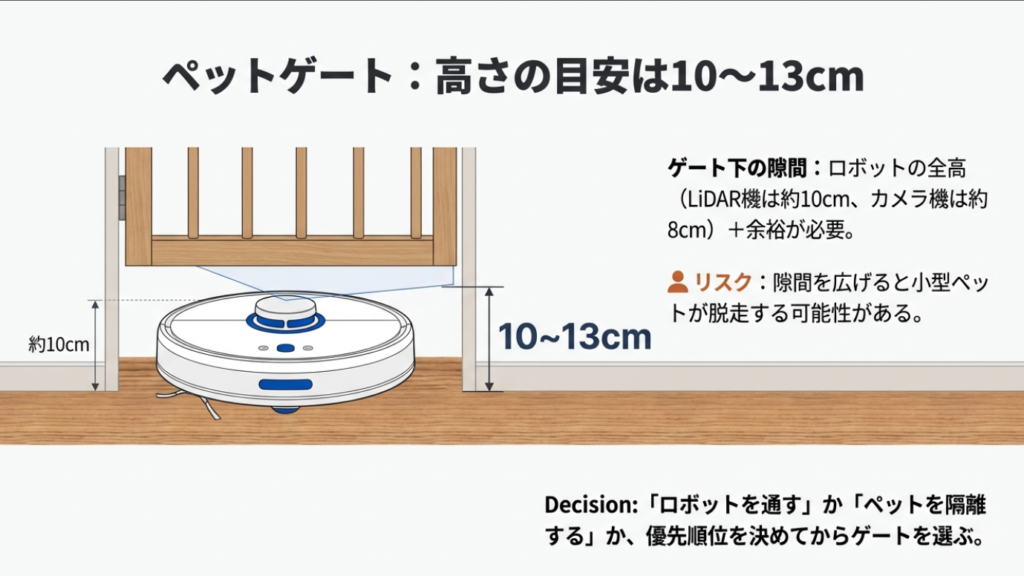
下のすき間は“ロボットの全高”が基準
基本はシンプルで、ロボット掃除機がゲートの下を通るには、ロボットの全高以上のクリアランスが必要です。一般的な目安として、LiDAR搭載モデルは全高がだいたい9.5〜10cm前後、薄型のカメラ搭載モデルだと7.5〜8.5cm前後が多いです。だからゲート下のすき間は10〜13cmくらいあると安心寄り。ただし、これはあくまで一般的な目安で、あなたの機種の高さは必ず公式スペックで確認してください。
ゲート下すき間を考えるときのチェック項目
- ロボット本体の全高(公式スペックで確認)
- ゲート下の実測(床材や段差込みで測る)
- ロボットが斜めに入る可能性(余裕を持たせる)
- ペットが抜ける可能性(体格と性格)
すき間を大きくするとペットも抜ける問題
ここがいちばん難しいところです。ロボットが通るためにすき間を増やすほど、猫や超小型犬は抜けやすくなります。つまり、ロボット都合で設計すると、ペットの安全が負ける可能性がある。だから私は、まず「ペットを絶対に通したくない」か「通ってもOKなゾーン」かを先に決めて、次にロボットのルートを考える順番がいいと思います。
【重要】ペットの脱走リスクについて
ロボットを通すために隙間を10〜13cm空けると、生後数ヶ月の子猫、超小型犬(チワワ等)、ウサギ、フェレットなどは容易にすり抜けてしまいます。
「ロボットを通すこと」よりも「ペットや幼児の命を守ること」を最優先してください。すり抜けのリスクがある場合は、ゲート下を開けるのではなく、そのエリアのロボット掃除を諦める(人間が掃除する)判断も必要です。
▼ロボットが通れる隙間調整が可能なゲート例
(※購入前に必ずペットが通り抜けられないかサイズを確認してください)
ゲートの代わりに“掃除ルール”で解くのもアリ
ゲートでロボットを通す設計が難しいなら、発想を変えて、掃除の時間帯や部屋指定で解く方法もあります。例えば、ペットがケージにいる時間だけロボットを回す。あるいは、ペットが出入りする部屋はロボット清掃を諦めて、人間の掃除を週1回に寄せる。ややこしく聞こえるかもですが、暮らしに馴染むのはこういう運用です。
段差2cmはスロープで解消
市販のベビーゲートを使うときの落とし穴が、床の下枠(フレーム)です。安定性のために段差ができるので、ロボットがそこでスタックしがち。ここ、購入後に気づく人が多いので、先に強めに言っておきます。ベビーゲートは、ロボット掃除機のために作られていないです。だからロボット目線で見ると「立派な段差」で、通れないことがあるんですよね。
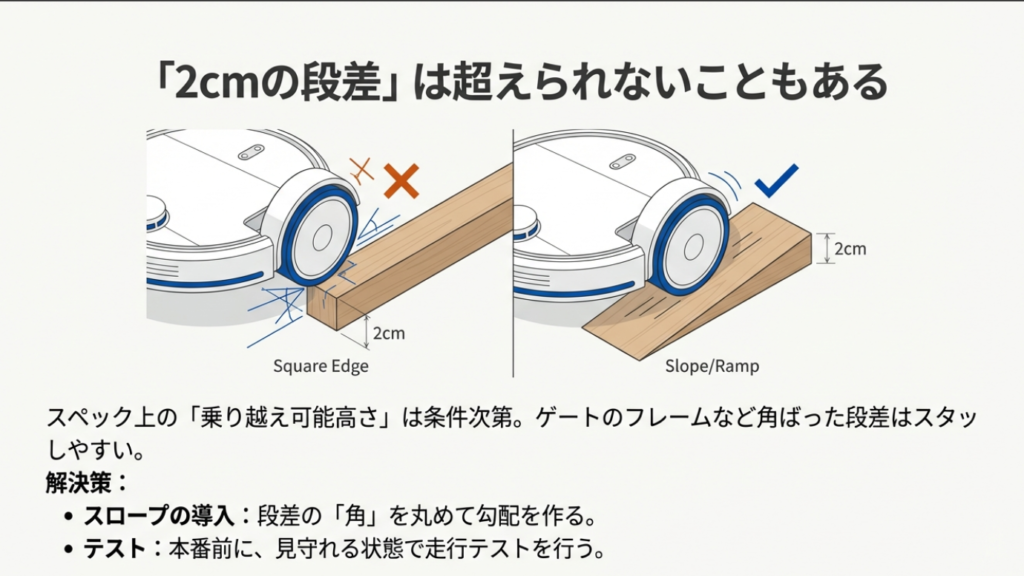
2cm目安は“通れる保証”ではない
一般的な目安として、乗り越え可能段差は2cm前後と言われることが多いですが、これも機種と床の相性で変わります。タイヤの径、サスペンション的な余裕、段差の角の立ち方、床材(カーペットかフローリングか)で、同じ高さでも結果が変わります。だから私は、2cmという数字を「買う基準」ではなく、買う前に現場で測ってテストする基準として使うのがおすすめです。
スロープが効く理由
スロープは段差そのものを消すというより、段差の“角”を丸めて、ロボットが登りやすい勾配にする道具です。角が立っている段差は、タイヤが空転しやすいし、ロボットの底面が擦りやすい。そこをなだらかにすると、乗り越え成功率が上がります。対策はシンプルで、ゲートの前後に段差解消スロープを置いて勾配を作ること。いきなり本番投入せず、まずは昼間に見守れる時間にテストして、「引っかからないか」「斜めに乗って腹を擦らないか」を確認するのがおすすめです。
▼「あと数ミリで超えられない」を解決する薄型スロープ
ロボット掃除機のために作られた、なだらかな勾配設計がポイントです。
スロープ導入前のテスト手順(私のやり方)
- ゲートを仮設置して段差の実測をする
- ロボットを手動で近づけて“登りかた”を観察する
- スロープを仮置きして、正面・斜めの両方でテストする
- 通過後に引き返せるか(戻り動作)も確認する
ゲート以外の選択肢もちゃんと見る ロボットの進入制御そのものは、ゲートだけじゃなくアプリの進入禁止やバーチャルウォール、物理バリケードでも解けます。ゲートにこだわるほど沼るケースもあるので、発想を広げたい人は、下の記事もどうぞ。
ロボット掃除機のドア開けっ放し最適解
最後にまとめです。ロボット掃除機のドア開けっ放しは、ずっと開けっぱなしにするかどうかの二択じゃなくて、マッピングの時は開ける/普段は環境でコントロールするのが一番ラクかなと思います。ここ、ふわっと聞こえるかもですが、実際に続くのはこのやり方です。毎日ドアを気にしてストレスを抱えるより、やるべきときだけドアを開けて、普段は物理アイテムで事故を潰す。これが最短で“平和”になります。
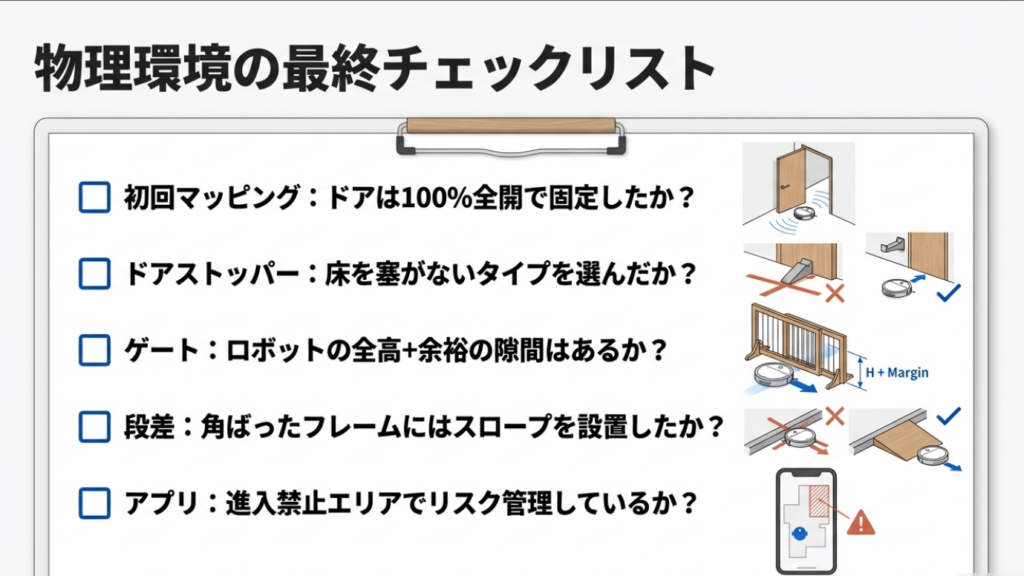
私がすすめる「2フェーズ運用」
フェーズを分けると考えやすいです。最初のフェーズは、地図づくり(初期マッピング・部屋の追加認識)。このときはドア全開で固定して、ロボットに家の全体像を覚えさせます。次のフェーズが日常運用。ここでは冷暖房や生活動線、ペットの安全が優先になるので、ドアは閉めてもOK。その代わり、必要なところだけドアストッパーやゲート、スロープで調整します。
私のおすすめ運用(ざっくり)
- 初期マッピングはドア全開で固定
- 在宅・冷暖房中は部屋指定で回す
- 勝手に閉まるならドアストッパー導入
- ペット対策はゲート+段差はスロープ
数字は目安、最後はあなたの家で決める
この記事で出てきた数値(10〜13cm、2cmなど)は、あくまで一般的な目安で、機種や住環境で変わります。段差の形状、床材、ロボットのタイヤや走行ロジックで、同じ数値でも結果がズレます。だからこそ、買う前に測る、仮置きで試す、見守れる時間にテストする、の3点が大事です。
製品の仕様や安全性については、必ずメーカー公式の最新情報をご確認ください。特にペットや小さなお子様がいるご家庭では、利便性よりも安全性を最優先した判断をお願いします。
もし別の“詰まりどころ”(絡まり、メンテ、毛の問題など)も気になっているなら、こっちも合わせて読むと全体のストレスが減ります。